

1. High Order Finite Elements
Basis functions minimizing the condition number.
In [1] the construction
of basis functions minimizing the iteration number is
described. The resulting shape functions ![]() are
compositions of certain orthogonal polynomials involving
integration and linear combinations. Using his symbolic
summation package Sigma [11] C. Schneider
derived recurrence relations allowing an efficient
computation of the functions
are
compositions of certain orthogonal polynomials involving
integration and linear combinations. Using his symbolic
summation package Sigma [11] C. Schneider
derived recurrence relations allowing an efficient
computation of the functions ![]() .
.
Inner shape functions using integrated Jacobi
polynomials.
In [2] shape functions for
triangular ![]() -FEM
are described which are constructed using products of
specific Jacobi polynomials
-FEM
are described which are constructed using products of
specific Jacobi polynomials ![]() The parameters
The parameters ![]() are chosen to obtain a sparse system matrix in the case of a
constant coefficient function and a polygonally bounded
domain. For the case of a curved domain or a non constant
coefficient function an efficient preconditioner is derived.
are chosen to obtain a sparse system matrix in the case of a
constant coefficient function and a polygonally bounded
domain. For the case of a curved domain or a non constant
coefficient function an efficient preconditioner is derived.
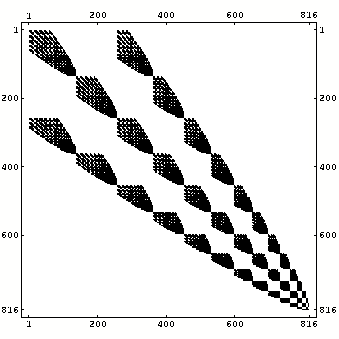
The idea of this design was carried over to tetrahedral
finite elements. To obtain the correct parameters ![]() in
the definition of the basis functions and especially to prove
the sparsity of the system matrix, the assistance of computer
algebra software was needed.
in
the definition of the basis functions and especially to prove
the sparsity of the system matrix, the assistance of computer
algebra software was needed.
With a Mathematica program we proved the nonzero pattern of
the interior block of the system matrix, i.e.,

Currently we are investigating the numerical properties of
these basis functions as well as the construction of an
efficient preconditioner for the system matrix.
 |
A Mathematica FEM package.
In order to have a platform for numerical-symbolic
interaction V. Pillwein developed the Mathematica
package Fem2D. Within this program the RISC symbolic
summation package (including Sigma,
MultiSum, ...) can be invoked directly.
Orthogonal polynomials, which are widely used in the design of fe-basis functions, can be represented in different ways such as using their recursive description or hypergeometric sum representation. In a symbolic framework one can exploit this variety and study the benefits of different representations.
In the example described above, carefully chosen Jacobi polynomials were used in the construction of new shape functions. The Mathematica FEM package allows to generalize this idea to a systematic application of CA in the designing process. In Fem2D it is possible to implement families of basis functions leaving some parameters unknown, which are later specified according to desired numerical properties.
 |
2. Symbolic Integration of Special Functions
The particular need within F1301 for a symbolic integration algorithm that can do definite integrals arising in connection with high order finite element methods such as

involving Jacobi polynomials
A function is called elementary if it is obtained
by composing exponentials, logarithms, algebraic functions,
and field operations. Risch gave a complete algorithm for the
symbolic integration of elementary functions. Given an
elementary function ![]() , it decides if an elementary function
, it decides if an elementary function ![]() exists such
that
exists such
that ![]() . If such a
. If such a
![]() exists, it
returns it. Note that Risch's algorithm does not apply to
integrals such as (1) for two
reasons. First, the Jacobi polynomials
exists, it
returns it. Note that Risch's algorithm does not apply to
integrals such as (1) for two
reasons. First, the Jacobi polynomials ![]() appearing in (1) are not elementary (when
appearing in (1) are not elementary (when ![]() is
undetermined); in fact, most of the classical special
functions from mathematical physics are not elementary.
Second, Risch's algorithm is restricted to
indefinite integration problems, while (1) is definite.
is
undetermined); in fact, most of the classical special
functions from mathematical physics are not elementary.
Second, Risch's algorithm is restricted to
indefinite integration problems, while (1) is definite.
A recent algorithm that applies to a wide class of non-elementary special functions is Manuel Bronstein's Poor Man's Integrator [3]. It is a variant of Risch-Norman's parallel integration method, based on a new structure theorem of Manuel Bronstein.
Within the frame of F1301, B. Zimmermann extended
Bronstein's Poor Man's Integrator to definite integration
problems where the integrand depends on a discrete parameter
![]() . Given such an
integrand
. Given such an
integrand ![]() and a natural number
and a natural number ![]() , his algorithm looks for coefficients
, his algorithm looks for coefficients ![]() and a function
and a function ![]() such
that
such
that
this relation implies the linear recurrence
Zimmermann's extension of the Poor Man's Integrator is
inspired by Doron Zeilberger's extension of Gosper's
algorithm for hypergeometric summation (Zeilberger's
algorithm). The same method was used by C. Schneider [11] in his extension
of Karr's summation algorithm to definite summation. In all
three cases, the key is to observe that the underlying
algorithm has the special property that it can be applied to
an input ![]() , where
, where ![]() , ...,
, ..., ![]() are
initially undetermined coefficients and
are
initially undetermined coefficients and ![]() , ...,
, ...,
![]() are
given. These coefficients show up as additional variables in
the linear equation system which the underlying algorithm
solves. That way, the underlying algorithm determines them,
in addition to determining a suitable
are
given. These coefficients show up as additional variables in
the linear equation system which the underlying algorithm
solves. That way, the underlying algorithm determines them,
in addition to determining a suitable ![]() such that
such that
![]() .
To find recurrences for integrals, one uses this with
.
To find recurrences for integrals, one uses this with ![]() for
for ![]() .
.
The new algorithm works in a field of of rational
functions ![]() where
where ![]() with
with ![]() a field.
a field. ![]() is endowed with
a shift
is endowed with
a shift ![]() and a
derivation
and a
derivation ![]() ,
which commute with each other, and such that the field of
constants of
,
which commute with each other, and such that the field of
constants of ![]() is
is
![]() and that
and that ![]() is in the field
of constants of
is in the field
of constants of ![]() . Each indeterminate
. Each indeterminate ![]() corresponds
to some term which possibly involves
corresponds
to some term which possibly involves ![]() and
and ![]() , the shift
, the shift ![]() corresponds to the shift
corresponds to the shift ![]() , and the derivation
, and the derivation ![]() corresponds to
the partial derivative
corresponds to
the partial derivative ![]() . For any P-finite
function
. For any P-finite
function ![]() one can construct such a suitable field
one can construct such a suitable field ![]() which models
the field of functions generated by all the shift-derivatives
of
which models
the field of functions generated by all the shift-derivatives
of ![]() . Given
. Given
![]() in
in ![]() , the new
algorithm returns a basis for the
, the new
algorithm returns a basis for the ![]() -vector space of all
-vector space of all ![]() such that
such that ![]() and
and ![]() is an
elementary extension of the differential field
is an
elementary extension of the differential field ![]() . As the
algorithm is based on Bronstein's heuristic Poor Man's
Integrator, it may, in rare occasions, return a basis for a
proper subspace of this
. As the
algorithm is based on Bronstein's heuristic Poor Man's
Integrator, it may, in rare occasions, return a basis for a
proper subspace of this ![]() -vector space.
-vector space.
So far, the best computer algebra methods for definite
symbolic integration of special functions were based on
elimination in Ore Algebras by Gröbner basis methods
(e.g. [4])). These methods
are restricted to P-finite integrands, and they are known to
terminate for the class of holonomic integrands, which form a
subclass of the class of P-finite integrands. While
Zimmermann's extension also handles any P-finite integrand
and terminates on holonomic input, it can handle a wider
class of inputs. The class of inputs which it can handle is
closed under composition - unlike the class of P-finite
functions. It contains certain non-P-finite functions such as
the tangent function and Lambert's ![]() function.
function.
The new algorithm is not yet published; it will appear in
a forthcoming Ph.D. thesis [13].
3. Applications of Gröbner Bases
3.1 Implementations of Gröbner Bases
In the algebraic treatment of systems of equations
involving linear operators (like partial differentiation,
partial difference and so on), the choice of coefficient
domain leads us to different algebraic structures. For the
case of constant (scalar) coefficients, the underlying system
algebra is commutative. If the coefficients are polynomial in
the variables of the system, we obtain a non-commutative ![]() -algebra (e.g.
[8]). Numerous algorithms,
based on Gröbner bases for these two cases, are
implemented in the specialized Computer Algebra System
SINGULAR [7]. The system is freely
available for the non-commercial use and, moreover, is widely
known for its performance. In 2004, the
SINGULAR team was awarded with the Richard D.
Jenks Memorial Prize for Excellence in Software Engineering
for Computer Algebra. The non-commutative subsystem
SINGULAR:PLURAL [6] handles the algebras
arising from systems with polynomial coefficients, including
algebras with additional polynomial identities. For
example, the algebra of linear differential operators with
polynomial coefficients in trigonometric functions is
realized as a factor algebra. Let
-algebra (e.g.
[8]). Numerous algorithms,
based on Gröbner bases for these two cases, are
implemented in the specialized Computer Algebra System
SINGULAR [7]. The system is freely
available for the non-commercial use and, moreover, is widely
known for its performance. In 2004, the
SINGULAR team was awarded with the Richard D.
Jenks Memorial Prize for Excellence in Software Engineering
for Computer Algebra. The non-commutative subsystem
SINGULAR:PLURAL [6] handles the algebras
arising from systems with polynomial coefficients, including
algebras with additional polynomial identities. For
example, the algebra of linear differential operators with
polynomial coefficients in trigonometric functions is
realized as a factor algebra. Let ![]() be the algebra generated by
be the algebra generated by ![]() over
over ![]() subject to the relations
subject to the relations ![]() ,
, ![]() and
and ![]() . Then, we consider
the two-sided ideal
. Then, we consider
the two-sided ideal ![]() ,
compute its two-sided Gröbner basis (which is just
,
compute its two-sided Gröbner basis (which is just ![]() in this case) and pass to the factor algebra
in this case) and pass to the factor algebra ![]() , where the
further computations will take place.
, where the
further computations will take place.
Generalization of Gröbner Bases.
In order to treat the case of rational functions in the
variables as the coefficient domain, we employ the notion of
an Ore localization. Our aims are to extend the
Gröbner bases theory to the Ore-localized ![]() -algebras, not
restricting ourselves to the case of so-called Ore
algebras ([4], [5]), to investigate the criteria
for discarding the critical pairs and to implement
efficiently Gröbner bases and related algorithms
(involving advanced ones as in e.g. [8]) in the framework of
SINGULAR. One of the most important tasks is
to provide powerful algorithms and their efficient
implementation for the complicated arithmetics over rings of
quotients of non-commutative domains.
-algebras, not
restricting ourselves to the case of so-called Ore
algebras ([4], [5]), to investigate the criteria
for discarding the critical pairs and to implement
efficiently Gröbner bases and related algorithms
(involving advanced ones as in e.g. [8]) in the framework of
SINGULAR. One of the most important tasks is
to provide powerful algorithms and their efficient
implementation for the complicated arithmetics over rings of
quotients of non-commutative domains.
Intercommunication packages.
With the help of recent packages, the fast and functionally
rich implementation of algorithms, relying on Gröbner
bases in SINGULAR, became available to the
general purpose systems. The package, allowing
MATHEMATICA to exchange data and to call
SINGULAR externally, is being developed by
Manuel Kauers, F1305.
3.2 Symbolic Generation and Stability Analysis of Finite Difference Schemes
For the linear PDEs with constant coefficients the process
of generating finite difference schemes may be performed
symbolically, with the help of Gröbner bases for
submodules of free modules over a commutative polynomial
ring. We propose a more efficient method than the one
proposed in [12]. Our method
can be applied, in particular, for higher spatial
dimensions without significant loss of performance. It
can be shown that applying several symbolic approaches we are
able to reproduce all the classical finite difference
schemes. The input data consist of equations and
corresponding approximation rules for the partial
derivatives, written in terms of polynomials in partial
difference operators like ![]() , where
, where
![]() for
discrete indices
for
discrete indices ![]() .
.
For the equation
![]() with some initial
conditions, we apply the 2nd order central approximations for
both
with some initial
conditions, we apply the 2nd order central approximations for
both ![]() and
and ![]() in the vector
operator form, e. g.
in the vector
operator form, e. g.
![]() . With this symbolic data we form a submodule of a free
module involving partial difference operators. By using
Gröbner bases, we eliminate certain module components
from a given module and obtain a submodule, corresponding to
the operators, which depend only on
. With this symbolic data we form a submodule of a free
module involving partial difference operators. By using
Gröbner bases, we eliminate certain module components
from a given module and obtain a submodule, corresponding to
the operators, which depend only on ![]() and not on its
derivatives.
and not on its
derivatives.
We denote
![]() , and
obtain the scheme, written in terms of operators,
, and
obtain the scheme, written in terms of operators,
Using specially developed visualization tools (e. g. a SINGULAR library discretize.lib), in a semi-automatic way we are able to present the scheme above in the more convenient nodal form, namely as

With our methods we are able to generate all the classical linear schemes (as it has been noted in [12]) as well as more complicated schemes, including the schemes with parametric switches.
Using the efficient implementation of Gröbner bases, these 1-dimensional examples both in time and space can be computed in seconds.
Von Neumann Stability Analysis.
Also, the investigation of von Neumann stability of a given
finite difference scheme can be done by symbolic methods.
Moreover, for (un-)conditionally stable schemes we can
perform the dispersion analysis. For both applications the
system SINGULAR is used for polynomial
computations, mappings and the translation of the output to
the special (nodal) form, used in the literature on finite
difference schemes. MATHEMATICA is used for
computing the Cylindrical Algebraic Decomposition, arising in
the final stage of both stability and dispersion
analysis.
In the example above, we employ the stability
morphism from the ring
![]() , sending
, sending
![]() and
and
![]() to the ring
to the ring
![]()
![]() . Here,
. Here,
![]() and
and
![]() for some
for some ![]() . After the
purely algebraic simplification in the ring
. After the
purely algebraic simplification in the ring ![]() , we obtain the
stability polynomial in one variable
, we obtain the
stability polynomial in one variable
![]() ,
where
,
where
![]() . A scheme given by a
polynomial in one variable is von Neumann stable, if
the modulus of every root is at most 1. In our example, the
stability polynomial has roots
. A scheme given by a
polynomial in one variable is von Neumann stable, if
the modulus of every root is at most 1. In our example, the
stability polynomial has roots
![]() .
If
.
If ![]() , the
absolute value of one of the roots is bigger than one. If
, the
absolute value of one of the roots is bigger than one. If
![]() , the
modulus of both roots is equal to 1. Moreover,
, the
modulus of both roots is equal to 1. Moreover,
![]() . Hence, the
investigated scheme is conditionally stable with the
condition for the Courant number
. Hence, the
investigated scheme is conditionally stable with the
condition for the Courant number
![]() .
.
We are going to apply the developed methods for finite difference schemes in cases of higher spatial dimensions, for systems of multidimensional equations, for two-step schemes like Lax-Wendroff etc.
A very important direction of further research (discussed
with Prof. W. Zulehner, F1306) is to elaborate the
conditions for boundary value problems, for which von Neumann
stability (which can be checked by symbolic methods as we
have sketched above) implies the numerical stability.
3.3 Control Theory
Algebraic Analysis.
Given a module ![]() over
an algebra
over
an algebra ![]() , we
can present it as a sum
, we
can present it as a sum ![]() , where
, where ![]() is a torsion submodule of
is a torsion submodule of ![]() and
and ![]() a torsion-free
submodule. In Control Theory, there is a correspondence
between this presentation and the decomposition of a system
into a controllable part (torsion-free submodule) and an
autonomous part (torsion submodule). For systems of
equations, involving linear operators, the torsion submodule
can be described and computed with the help of homological
algebra [5], which in turn
depend heavily (both algorithmically and in the
implementation) on Gröbner bases.
a torsion-free
submodule. In Control Theory, there is a correspondence
between this presentation and the decomposition of a system
into a controllable part (torsion-free submodule) and an
autonomous part (torsion submodule). For systems of
equations, involving linear operators, the torsion submodule
can be described and computed with the help of homological
algebra [5], which in turn
depend heavily (both algorithmically and in the
implementation) on Gröbner bases.
The methods of algebraic analysis, applied to the problems of Control Theory, have been implemented for the case of constant coefficients [9] in the library control.lib for the system SINGULAR [7]. The development of the generalization to the case of variable coefficients is in progress. It relies on the implementation of Gröbner bases in the system SINGULAR:PLURAL [6] and on the library for non-commutative homological algebra.
Genericity of Parameters.
In systems, containing parameters, it often happens that some
structural properties, like controllability or autonomy, hold
only for the generic case, that is, for almost all
values of parameters. It means, there might exist such values
of parameters that, e.g. a generically controllable
system, specialized at these values, becomes
non-controllable. We provide an algorithmic way to detect
such and similar phenomena, which we call the genericity
violation. The results for 1-dimensional systems appear
in [10], while in the future
we concentrate on the general situation.
Bibliography
- 1
- A. BECIROVIC, P. PAULE,
V. PILLWEIN, A. RIESE, C.
SCHNEIDER, AND J.
SCHÖBERL.
Hypergeometric Summation Methods for High Order Finite Elements.
Tech. Rep. 2006-8, SFB F013, J. Kepler University Linz, 2006. - 2
- BEUCHLER, S., AND
SCHÖBERL, J.
New shape functions for triangular -FEM using
integrated Jacobi polynomials.
-FEM using
integrated Jacobi polynomials.
Num. Mathematik (2006).
to appear. - 3
- BRONSTEIN, M.
Symbolic Integration I (Transcendental Functions), 2nd ed.
Springer, 2005. - 4
- CHYZAK, F. AND
SALVY, B.
Non-commutative Elimination in Ore Algebras Proves Multivariate Identities.
J. Symbolic Computation 26, 2 (1998), 187-227. - 5
- CHYZAK, F., QUADRAT, A.
AND ROBERTZ, D.
Linear control systems over Ore algebras. Effective algorithms for the computation of parametrizations.
In Proc. TDS'03 (2003), INRIA. - 6
- GREUEL, G.-M.,
LEVANDOVSKYY, V., AND
SCHÖNEMANN H.
PLURAL, a SINGULAR 3.0 Subsystem for Computations with Non-commutative Polynomial Algebras. University of Kaiserslautern, 2005. - 7
- GREUEL, G.-M., PFISTER
G., AND SCHÖNEMANN H.
SINGULAR 3.0. A Computer Algebra System for Polynomial Computations. Centre for Computer Algebra, University of Kaiserslautern, 2005.
Available from http://www.singular.uni-kl.de. - 8
- LEVANDOVSKYY, V.
Intersection of Ideals with Non-commutative Subalgebras.
Tech. Rep. 2006-14, SFB F013, J. Kepler University Linz, 2006. - 9
- LEVANDOVSKYY, V. AND
ZERZ, E.
Computer algebraic methods for the structural analysis of linear control systems.
PAMM 5 (2005), 717-718. - 10
- LEVANDOVSKYY, V. AND
ZERZ, E.
Algebraic systems theory and computer algebraic methods for some classes of linear control systems.
In Proc. MTNS'06 (2006).
to appear. - 11
- SCHNEIDER, C.
A new Sigma approach to multi-summation.
Advances in Applied Math. 34, 4 (2005), 740-767. - 12
- V. P. GERDT, Y. A. BLINKOV,
AND V. V. MOZZHILKIN.
Gröbner Bases and Generation of Difference Schemes for Partial Differential Equations.
SIGMA 2 (2006), 051. - 13
- ZIMMERMANN, B.
Symbolic Definite Integration and Summation of Special Functions.
PhD thesis, RISC, J. Kepler University Linz, 2006.
In preparation.
SpezialForschungsBereich SFB F013 | Special Research Program of the FWF - Austrian Science Fund